中島 求 のページ



最終更新:2017.12.7
最終更新:2017.12.7
中島研究室のホームページは こちらです.
当研究室では,「人間」に関する諸問題について,人間を「システム」として捉え,従来からの機械工学,システム工学の学問体系も応用し,多角的に研究を行っています. 具体的分野を以下に挙げます. これらに興味を持った学生の皆さん,是非当研究室に来て下さい!
 水泳の全身筋骨格シミュレーション動画 (AVI, 2.8MB)
水泳の全身筋骨格シミュレーション動画 (AVI, 2.8MB)
バイオメカニクス(生体力学)とは,従来,機械などの人工物に適用されていた 力学の視点を,生体に応用する学際的な研究分野です. 一例として,本研究室で現在行なわれている,水泳時の筋骨格モデルによるシミュレーション解析の結果を左に示します. 筋骨格モデルとは,人間の全身の筋肉をワイヤーとしてモデル化し, 動作時にどこの筋にどれだけの負荷が発生しているかを調べるツールです. この解析例では全身の筋肉を458本のワイヤーにモデル化しています. またアニメーション中でピンク色になっている筋が筋力を発揮していることを 表わしています.
本研究室では水泳だけでなく,日常的な動作などさまざまな対象について
このような力学解析を行っています.
これにより,傷害などの人間自体に起こる問題の予防や解決,さらには人間が用いる道具や機械の,より人間に優しい開発設計などが可能になります.
 水泳人体シミュレーションモデルSWUMのサイトへジャンプ
水泳人体シミュレーションモデルSWUMのサイトへジャンプ
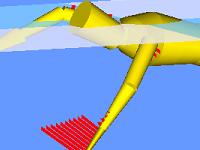
スポーツ工学とは,これまで生理学や体育学の視点からの研究がほとんどだったスポーツに対して,工学の視点からアプローチする研究分野です. 主な対象はスポーツ用具の製品設計ですが,そのための基礎研究として, スポーツを行なう人間自身にも工学の視点からの研究が行なわれています. 左は,水泳の力学シミュレータとして当研究室で開発された シミュレーションモデルSWUMと その実装ソフトウェアSwumsuitのページへのリンクです. このシミュレータは単なるCG的なソフトではなく, スイマーの体に働く流体力を流体力学の理論を応用して求め, またスイマー自身の体の運動をロボット工学の理論を応用して求めています.
このようなシミュレータを用いて力学解析を行なうことにより, もしかしたら,まだ世界の誰も見たことのない究極の新泳法が発見できるかもしれません.
また現在,このシミュレータ技術を応用して,
水泳選手の腰痛防止のための研究,
水泳がそれほど得意でない人を泳ぎやすくする水着の研究,
水中ウォーキングの研究,さらには水でなく空気により人体に流体力が働くスカイダイビングの研究なども行なっています.
 水泳ロボットのクロール動作の動画 (WMV, 4.8MB)
水泳ロボットのクロール動作の動画 (WMV, 4.8MB)
バイオロボティクスとは,生体の動きをロボットで模倣してそれを生体自身の研究に役立てたり,また生体にヒントを得て新しい形態・構造・機能を持ったロボットを開発する研究分野です.
一例として,左に当研究室で開発された水泳ロボットの動画を示します.
動作するのは腕1本だけですが,
肩,肘,手首にトルクセンサが内蔵されており,
水泳中に各関節に流体力により働くトルクが計測できます.
この水泳ロボットにより,上で紹介した水泳シミュレータの高精度化を目指しています.
また,左は本研究室で開発された水泳ヒューマノイド SWUMANOID (スワマノイド)の動画です. 上記の腕1本だけのロボットからさらに進化し,全身の関節が動きます. また実際のスイマーの身体形状を,より詳細に模倣し,リアルなヒューマノイドロボットとなっています. このようなロボットは,ヒューマノイドのモビリティを水中にまで拡張するという意味でも意義深いものです.
その他にも,すでに終了しているプロジェクトですが,
イルカの泳ぎにヒントを得たイルカロボットの開発なども行なっています.
 片上肢切断障害用補助具の試着実験の動画 (MPEG, 4.4MB)
片上肢切断障害用補助具の試着実験の動画 (MPEG, 4.4MB)
福祉工学とは,障害者や高齢者などのQOL(Quality of Life)の向上のための道具・装置・機械を開発する研究分野です. 一例として,当研究室で開発された,片上肢切断の障害者向けの水泳用補助具を左に示します.これは肘から先を事故などで失った人が,失う以前となるべく同じ感覚で泳げるようにすることを目的として研究開発したものです. 左図の試作実験は,健常者が肘を折り曲げて切断を模擬して装着して 行ないました(クリックすると試着実験の動画が始まります).
今後は水泳だけでなく,日常生活のさまざまな場面で利用される道具・装置・機械を研究開発していきます.
〒152-8552 東京都目黒区大岡山2-12-1-W8-14
東京工業大学 工学院 システム制御系 (西8号館W棟505号室)
TEL/FAX: 03-5734-2586
E-mail: motomu_aatt_sc.e.titech.ac.jp (aattを@に変えてください)
当ページに関して