Motomu Nakashima's website



Last update : 2017.12.7
Last update : 2017.12.7
Top page of Nakashima laboratory is here.
In our laboratory, various research fields related to "human" are studied from the mechanical point of view. Please feel free to contact me if you are interested in below topics.
 Animation of musculoskeletal simulation for swimming (AVI, 2.8MB)
Animation of musculoskeletal simulation for swimming (AVI, 2.8MB)
Biomechanics
is one of the main field of our laboratory.
An example shown in the left figure is
the result of musculoskeletal simulation for human swimming.
We are now mainly focusing on biomechanics of human swimming
since it is a challenging topic due to difficulty to consider
fluid force acting on the whole body of the swimmer.
 Jump to the website of Swimming Human Simulation Model "SWUM"
Jump to the website of Swimming Human Simulation Model "SWUM"
Another main field of our laboratory is Sports Engineering,
in which the various problems related to sports is studied
from the viewpoint of mechanical engineering.
For eaxmple, the left figure is linked to the website of
Swimming Human Simulation Model "SWUM" and
its implemented software "Swumsuit".
In this simulation model,
the fluid force and equations of motion for the swimmer
are computed by utilizing the thoery of fluid dynamics and robotics.
We are now conducting many research topics using this simulation technique.
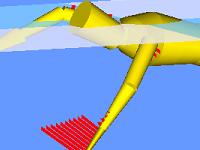
 Movie of crawl motion for swimming robot (WMV, 4.8MB)
Movie of crawl motion for swimming robot (WMV, 4.8MB)
Biorobotics is a new research field in which
the animal (including human) motions are mimicked for some application,
or novel robots are created inspired by the animal motions, structures, and functions.
The left figure is a movie of crawl motion for a swimming robot,
which has been developed by us.
We also had developed a dolphin robot which can swim in the
three-dimensional space
although this project is now suspended.
 Movie of experiment of prothetic for one side above-elbow amputation (MPEG, 4.4MB)
Movie of experiment of prothetic for one side above-elbow amputation (MPEG, 4.4MB)
In welfare engineering,
various tools, devices, and machines are developed
for physically disabled and/or elderly persons.
The left figure is an our example of a prothetic for one side above-elbow amputation.
In this experiment,
normal healthy subject attached the prothetic,
bending his elbow.
We will develop such kind of various tools, devices, and machines
used in daily various situations in our life.
2-12-1-W8-14 Ookayama, Meguro-ku, Tokyo 152-8552, Japan
Tel/Fax: +81-3-5734-2586 (direct)
E-mail: motomu_aatt_sc.e.titech.ac.jp (plase change "_aatt_" into "@".)